
私たちはしばしば、「歩行」を動物だけに許された特権的な行為だと捉えているが、それは意識に統御された結果ではなく、足部の構造と地面との関係がつくり出す創発現象である。私たちの身体もまた、その仕組みを内包して運ばれているに過ぎない。
二本の棒を相互に15度傾けて連結し、床面に立てる。摩擦により足部が変形し、その反力で重心が上下動く。これにより、物体はまるで自らの意志を持つかのように、左右の足が交互に床を押し返し、構造全体が一種の歩行運動を生み出す。
本シリーズは、モーター駆動のプロトタイプ、鑑賞者自身が動力源として介入するインスタレーション、そして身体が素材の物性に従属しながら移動するパフォーマンスから構成される。異なる条件のもとで、「歩行の主体はどこにあるのか」という問いを検証する。
二本の棒を相互に15度傾けて連結し、床面に立てる。摩擦により足部が変形し、その反力で重心が上下動く。これにより、物体はまるで自らの意志を持つかのように、左右の足が交互に床を押し返し、構造全体が一種の歩行運動を生み出す。
本シリーズは、モーター駆動のプロトタイプ、鑑賞者自身が動力源として介入するインスタレーション、そして身体が素材の物性に従属しながら移動するパフォーマンスから構成される。異なる条件のもとで、「歩行の主体はどこにあるのか」という問いを検証する。
ーーーーー
「あるもののための歩く機構:歩形」
A mechanism for walking things: Hokei
2025
W1000×D800×H300mm
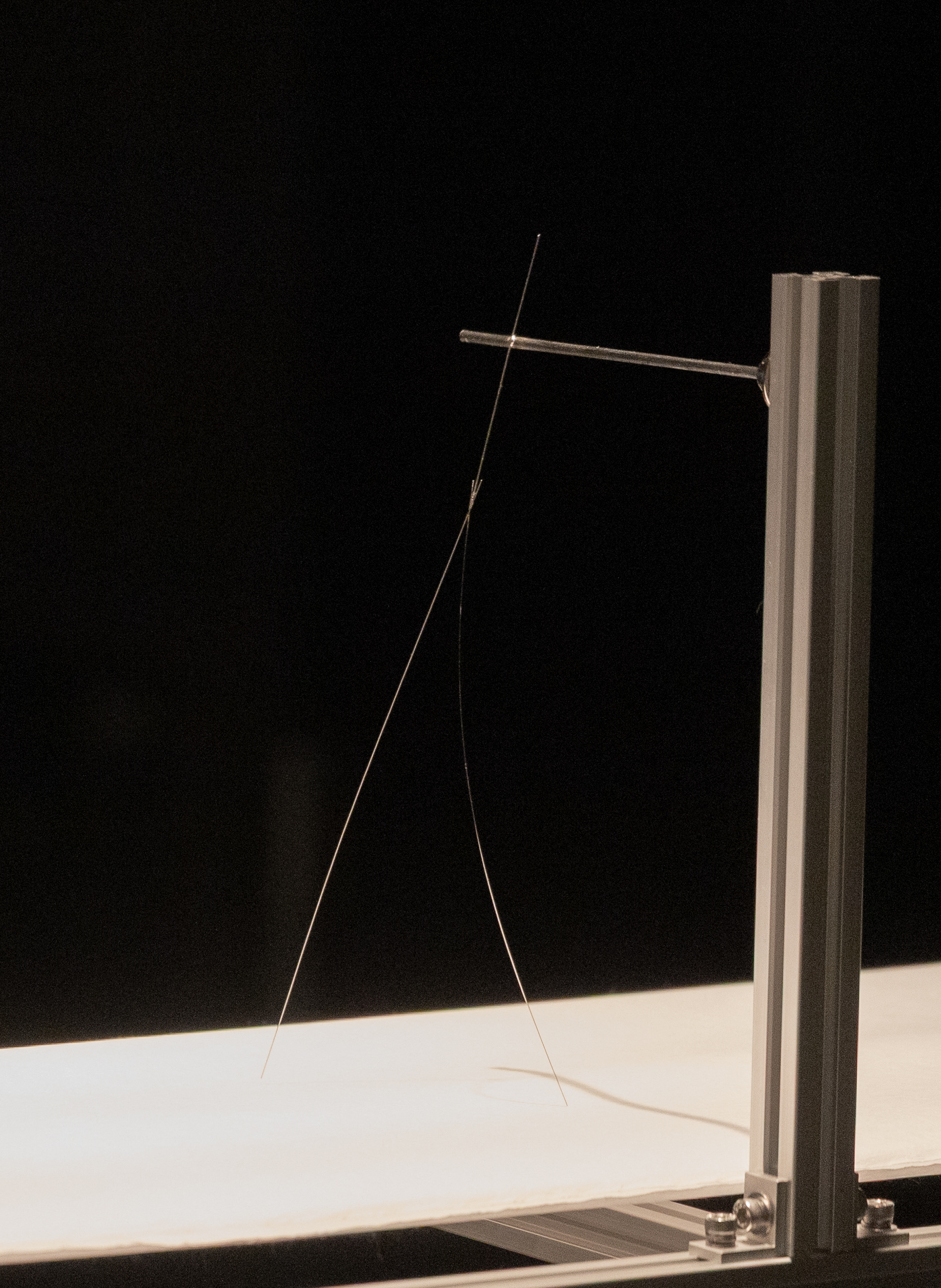
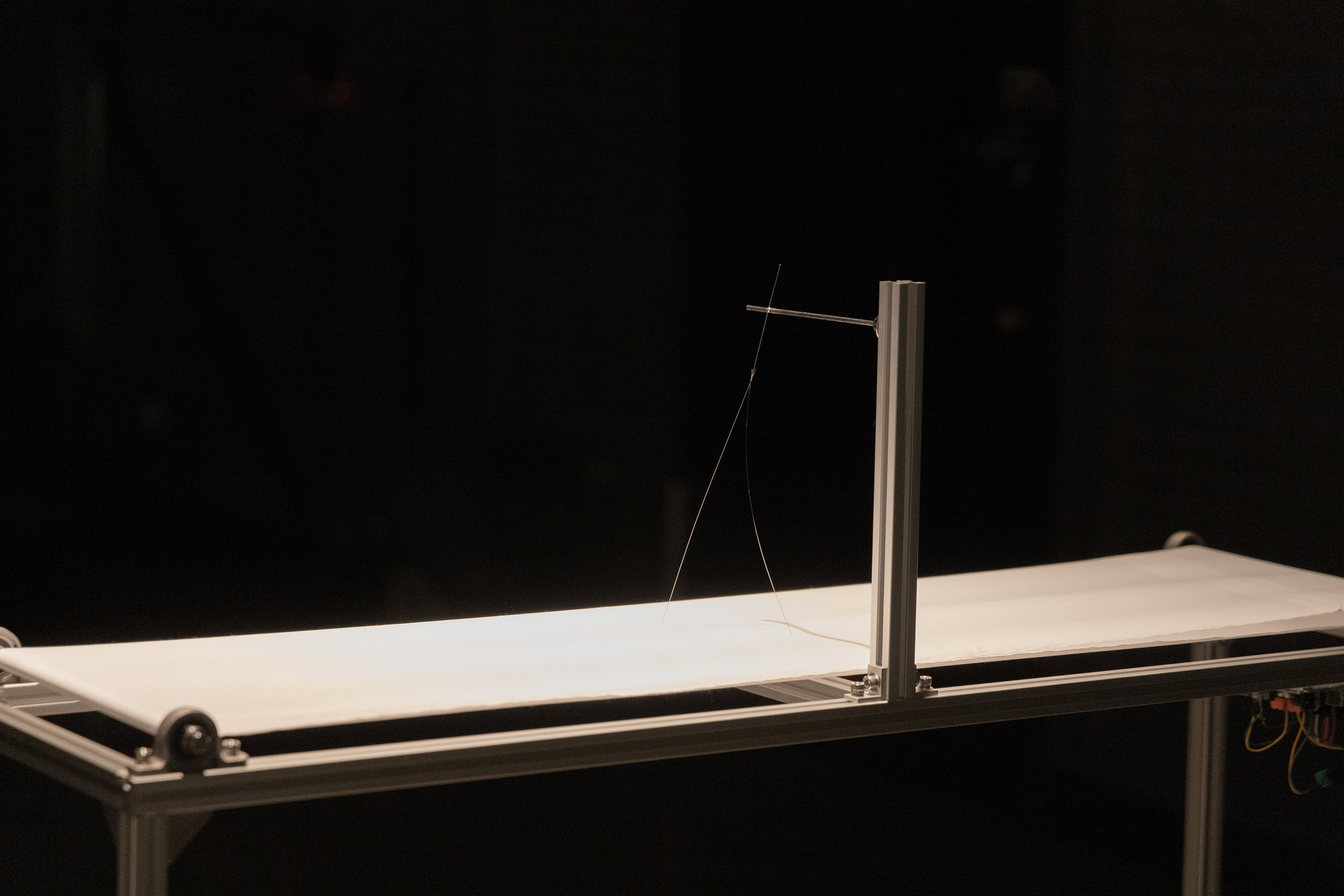
ピアノ線、帆布、ステッピングモーター、アルミフレーム
コンベアを用いた機構。一点で接する二本のピアノ線が、回転するベルト上で交互に反発を繰り返す。
電力が供給されるかぎり、歩くという行為は始点も終点も持たない運動として持続する。


ー
ーーーー
あるもののための歩き機構:プロトタイプ.1
A mechanism for walking things: prototype.1
2025
W3000×D300×H1000mm
回転盤、木
鑑賞者を動力源とする機構。
回転盤を回す入力動作がエネルギーとなり、その先に配置された木の棒が歩行運動を開始する。



ー
ーーーー
あるもののための歩き機構:プロトタイプ.2
A mechanism for walking things: prototype.2
2025
W2500×D2500×H2500mm
ピアノ線、ビデオカメラ、モニター、輪、木、パネル
木枠の中央にモニターとカメラを配置した機構。
鑑賞者が枠を携えて歩行すると、上部の天板に接する「足」が連動して動き出す。カメラはその様子を捉え、手元の画面にリアルタイムで中継する。鑑賞者は自身の移動と同期する、逆転した「足」の歩行を観察する。







ーーーー
パフォーマンス・シリーズ
Performance Series